About Me

京都大学工学部物理工学科の4回生です。 大学の制御研究室では、深層学習を応用した多自由度ロボットの制御手法について研究しています。 また、学業と並行して実務面ではバックエンド開発や画像認識AIの実装にも従事してきました。 制御理論の基礎と実システムへの実装経験、双方で培った知見を活かし、現在はより自律的な動作を実現する強化学習や模倣学習を活用したロボット開発に挑戦したいと考えています。
Career
Internships
-
mui Lab, Inc.
2024/04/01~TypeScriptとAWSを用いたバックエンド開発を行いました。現在はRaspberry Piを使用したIoTプロジェクトにも取り組んでいます。
-
Background
Education
-
京都大学工学部物理工学科
2022/04/01~2026/03/314大力学(機械力学、熱力学、材料力学、流体力学)や制御工学を中心に学びました。現在は制御研究室に所属し、深層学習とモデル予測制御(MPC)を組み合わせた多自由度ロボットの制御手法について研究しています。
-
京都大学大学院情報学研究科(進学予定)
2026/04/01~2026年4月からの進学を予定しています。学習機械分野の研究室に所属し、強化学習などを用いた自律型ロボットの研究に取り組みたいと考えています。
Selected Works
Projects
これまでに携わったプロジェクトの一部を紹介します。各プロジェクトの詳細については、カードをクリックしてご覧ください。

多自由度ロボットの制御
運動方程式の記述が困難、かつ非線形性の強い多自由度ロボットについて高精度な手先位置制御を実現するため、深層学習とモデル予測制御(MPC)を組み合わせた制御手法を研究しています。
- Python
- PyTorch
- MuJoCo
- LeRobot
- 研究

Debug Master
プログラミング初心者の「1から書く」ハードルを下げるため、AI生成の不具合コードを修正する新感覚学習アプリ「Debug Master」を開発。間違い探し感覚で楽しく学べる体験設計により、従来より気軽にコーディングスキルを習得できる学習環境を実現しています。
- AI
- TypeScript
- React
- FastAPI
- チーム開発

Debug Puzzle
Debug Masterの姉妹アプリで、ブロックを組み合わせてバグを修正するパズル形式の学習アプリ。コードを書いたことがない方向けに開発しました。プログラミングの基礎概念を楽しく学べるよう設計しました。
- AI
- TypeScript
- React
- FastAPI
- チーム開発
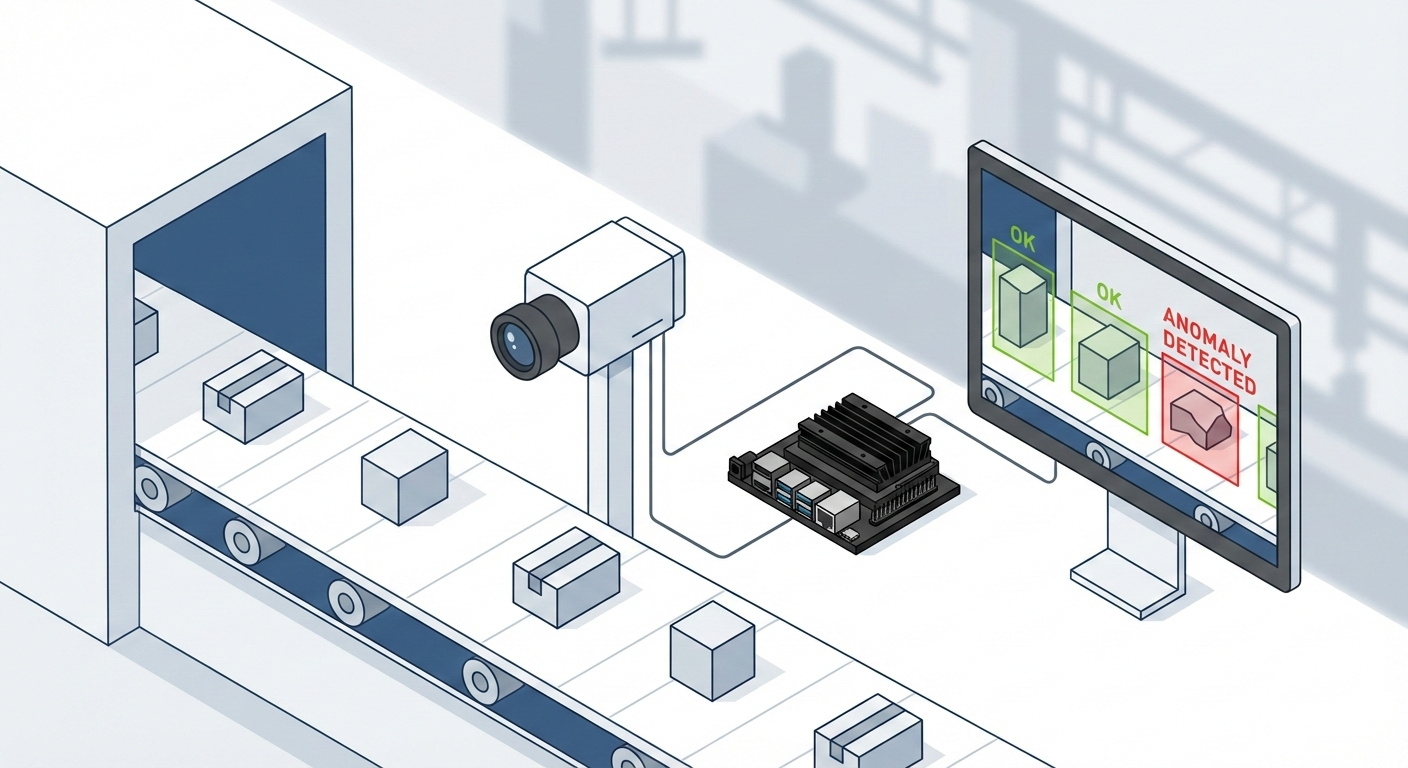
動画像の異常検知システム
製造業向けに、動画像から異常を検知するシステムを開発。NVIDIA Jetsonを用いたエッジデバイス上で、リアルタイムに高精度な異常検知を実現しています。これにより、製造ラインの品質管理と効率化に貢献しています。
- Python
- PyTorch
- OpenCV
- NVIDIA Jetson
- チーム開発